Hydramax
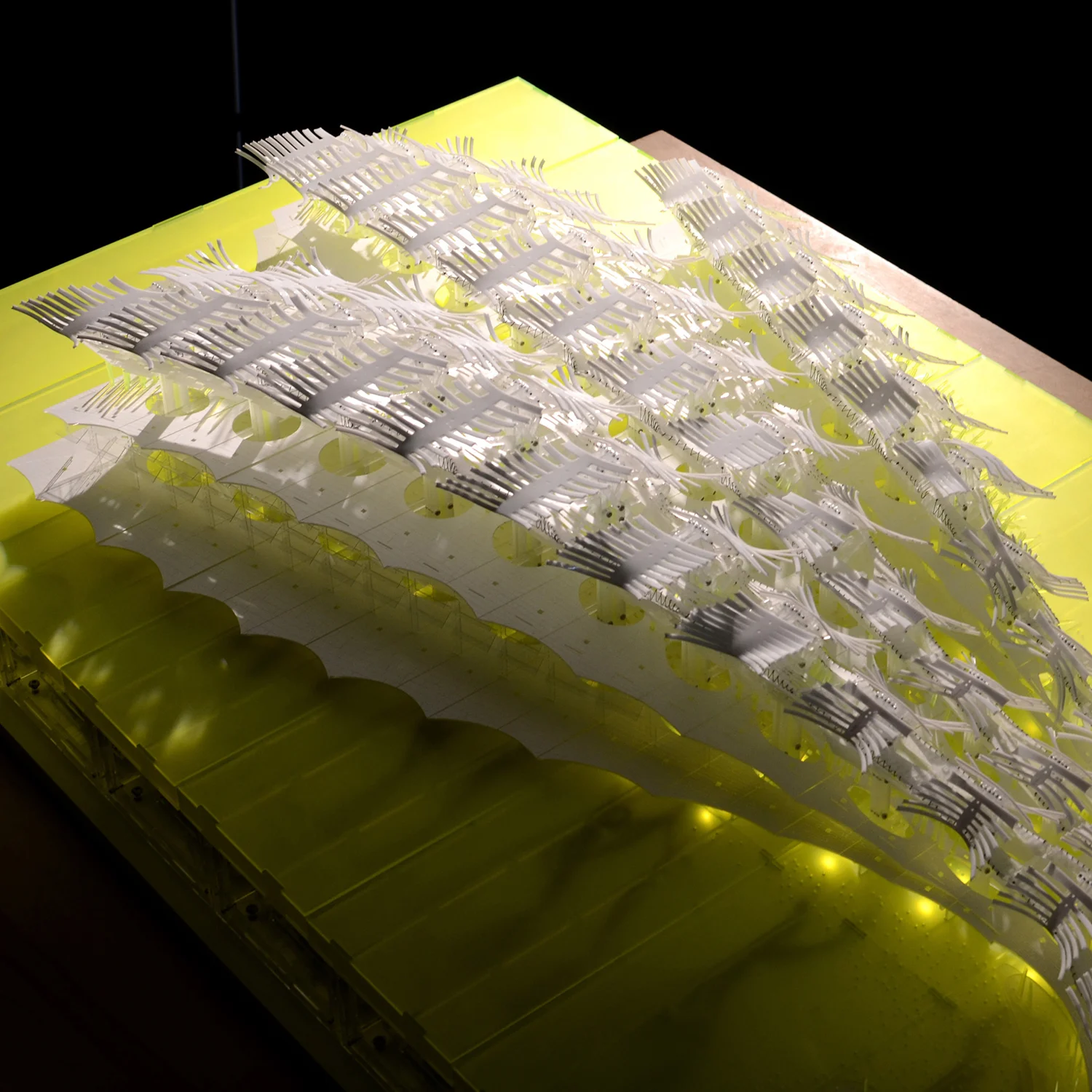
Futureform’s HYDRAMAX Port Machines project proposes a radical rethinking of San Francisco’s urban waterfront post sea-level rise. The proposal renders the existing hard edges of the waterfront as new “soft systems” that would include aquatic parks, community gardens, wildlife refuges and aquaponic farms. A synthetic architecture is introduced that blurs the distinction between building, landscape, infrastructure and machine. Using thousands of sensors and motorized components, the massive urban scale robotic structure harvests rainwater and fog, while modulating air flow, solar exposure and intelligent building systems.
Read more about it here.
Date: 2012
Location: San Francisco, California.
Design: Jason Kelly Johnson & Nataly Gattegno
Team: Ripon DeLeon, Cameron Eng, Gavin Johns
Collaborative Sponsor: MIGA Motor Company
Exhibited at: SFMOMA from 31 March to 29 July, 2012
Press: AD 2050, Hydramax featured on Cleveland.com
Interactive Model Description: A network of infrared proximity sensors has been integrated into the four sides of the physical model. These sensors record the distance of gallery visitors to its edges. Information from these sensors is used to actuate the white feather-like “fog harvesting robots” and control the brightness of embedded LEDS. This model is an example of what Future Cities Labs call “live models”. Live models use the interaction of people to explore and simulate the potential effects of environmental forces such as fog, wind and sunlight.
Model Materials and Electronics: Cast and thermoformed acrylic, custom printed circuit boards - layout in Fritzing and manufactured by PCB-Pool,Arduino "Mega" microcontrollers, infrared sensors, shape memory alloy motors (Courtesy of Miga Motor Company), interactive prototyping using Firefly and Grasshopper.